





Foxglove Enterprise
データ可視化 マルチモーダルデータ管理 自律システム開発支援
メーカー
Foxglove Technologies, Inc
製品仕様・価格・導入手順など、お気軽にお問い合わせください
(通常、1営業日以内に回答いたします)
Foxglove Enterpriseの製品概要
ロボット開発を加速する可視化・デバッグツール
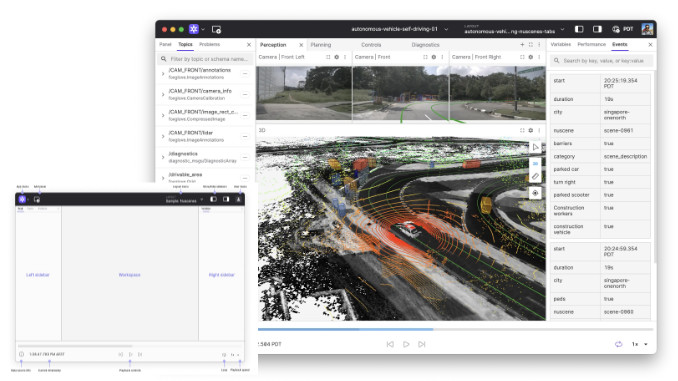
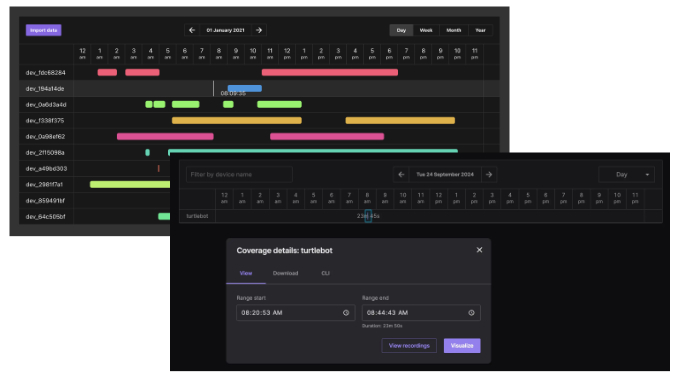
Foxgloveは、ロボティクスや自律システムの開発現場向けの、マルチモーダルデータ可視化・管理プラットフォームです。
ROS(Robot Operating System)をはじめとした様々なフォーマットに対応し、センサーデータ、ログ、地図、3Dモデルなどの複雑な情報を、直感的なインターフェースで表示・解析可能。タイムライン表示や3Dビュー、チャート、画像表示など多彩な機能により、ロボットの挙動を深く理解しながら、開発・デバッグ・運用を加速します。
クラウド・ローカル両対応でリアルタイム解析やチームでの共有もスムーズに行えます。
物理AI(Physical AI)分野においても、センサ・アクチュエータからの実世界データを扱うAIモデルの開発・検証基盤として有用です。
主な用途
- ロボットのセンサーデータ可視化と統合表示
- 自律走行・ロボティクス開発の支援
- 動作ログの解析とリアルタイムモニタリング
- 開発チーム間のデータ共有とコラボレーション
- デバッグ・トラブルシューティングの効率化
Foxglove Enterpriseの製品仕様
ライセンスについて
Foxgloveはサブスクリプションライセンスです。
チーム規模や用途に応じて複数のプランが用意されています。
ライセンスプラン
| プラン名 | 主な特徴 | 取扱い・申請方法 |
|---|---|---|
| Free(無償) | 最大3ユーザー / 10GBクラウド / 10台デバイスまで | ユーザーさまにて直接利用可能 |
| Starter(従量課金制) | チームレイアウト共有 / 無制限デバイス / 100GBクラウド | メーカー直販/弊社ではお取り扱いしておりません |
| Team(従量課金制) | デバイス管理 / Webhooks / SSO対応 / 1TBクラウド | メーカー直販/弊社ではお取り扱いしておりません |
| Enterprise | 自社ホスティング / Okta認証 / Slackサポート | ユニポスにて取扱い可能 |
| Academic(無償) | .edu / .acメールで申請可能 / 無制限ユーザー / 1TBクラウド | ユーザーさまにて直接申請 |
※Foxglove Enterpriseのお問い合わせ方法※
Foxglove Enterprise をご希望の際は、以下の情報をご提供ください。
いただいた内容をもとに、お見積りを作成いたします。
- Company: ライセンス登録者さまの企業名または機関名
- Name:ご担当者さまの氏名
- email:メールアドレス
- 利用ユーザー数:
※Enterpriseライセンスの最小ユーザー数は24ユーザーです。
各プランの機能詳細
以下の項目をクリックすると、プランごとの機能対応を確認できます。
プランの機能詳細説明を見る ▼
Free
- Visualization:基本的な可視化機能(画像・点群など)
- Data Management:10GBまでのクラウド保存、簡易検索
- Integrations:基本的なAPI・CLI連携
- ※ Agent / Extensibility / Securityは未対応または制限あり
Starter
- Visualization:カスタムパネル対応、ライブ・録画対応
- Data Management:100GBクラウド、デバイス無制限
- Integrations:API・CLI・SDK連携
- Extensibility:柔軟なUI構成対応
- ※ Agent / Securityは未対応
Team
- Visualization:全機能対応
- Data Management:1TBクラウド、デバイス管理付き
- Agent:自動アップロード対応
- Integrations:Webhook / SSO
- Extensibility:高度なUIカスタマイズ
- Security:組織管理・SSO対応
Enterprise
- Visualization:全機能対応
- Data Management:自社ホスティング / クラウド拡張
- Agent:大規模運用向け
- Integrations:Okta連携 / Slack通知
- Extensibility:企業向けカスタマイズ
- Security:高度なセキュリティ対応
Academic
- Visualization:全機能対応
- Data Management:1TBクラウド、無制限ユーザー
- Integrations:API・CLI・SDK
- ※ Agent / Securityは制限あり(要申請)
なぜFoxgloveが選ばれるのか?
従来のROSツール(rqt、RVizなど)では複雑な操作が必要だった可視化やデバッグ作業を、Foxgloveではシンプルかつ高速に実行できます。 UIは直感的で操作性に優れ、Webベースの環境でも高度な可視化が可能です。エラーの検出、動作検証、データ比較など、研究開発のあらゆるシーンで活用できます。
利用シーン
- 大学・研究機関でのロボティクス研究
- 自動運転技術の開発と検証
- 倉庫ロボットやドローンの運用シミュレーション
- ハードウェアベンチャー企業でのセンサーデバイス開発
- ロボット工学の教育現場での教材活用
主な研究分野
- ロボティクス
- 自律システム
- AI・機械学習
- センサーデータ解析
- ヒューマン・ロボット・インタラクション(HRI)
メーカー公式サイト (新しいタブで開きます)
Foxglove / 詳細(メーカーページ)
ロボティクス開発に特化した可視化・デバッグツール。
ROS / ROS2(Robot Operating System)や mcap 形式のデータを可視化し、ロボットの挙動を直感的に理解・解析できる開発支援プラットフォームです。
自律システム、センサーを活用したロボット制御や、研究用途にも適しています。
主な機能(一覧)
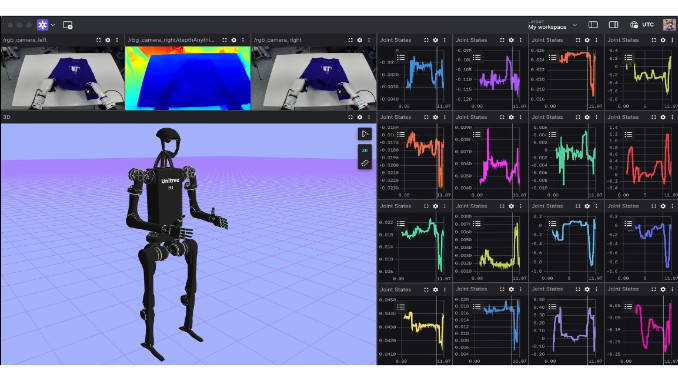
- 画像・動画・点群などのマルチモーダルデータ表示
- ライブストリーミングと録画データの可視化
- カスタムパネルによる柔軟なUI構成
- データのインデックス管理と検索機能
- SDK / API / CLI による開発環境との統合
3Dビュー、チャート表示、ROS対応、クラウド連携、プラグイン拡張など、多機能なデータ可視化が可能です。
※以下の項目をクリックすると、機能詳細を確認できます。
主な機能の詳細説明を見る ▼
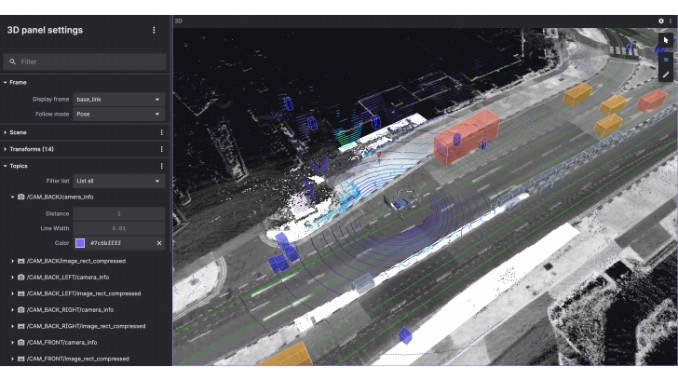
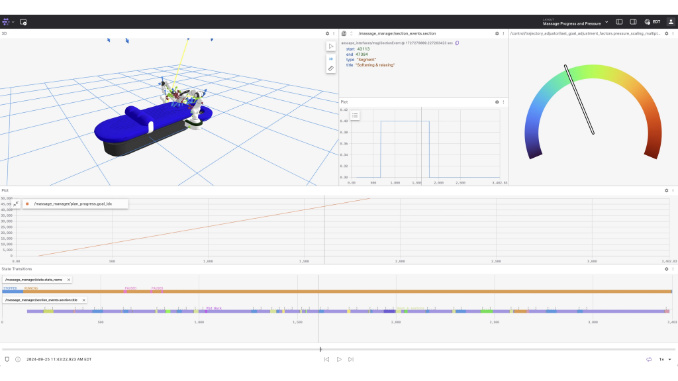
- 3Dビュー & タイムライン:時系列に沿ったセンサーデータ(LiDAR、カメラ、IMUなど)を同期表示。動作の再現や異常検知が容易です。
- チャートや画像パネル:数値データや画像の視覚化も可能。ロジックの可視化や比較に最適です。
- データソースの柔軟な取り込み:ROS1/ROS2だけでなく、MCAPなどの多様なフォーマットに対応。
- クラウド連携:データ共有や共同作業をクラウド経由で効率的に実施可能。遠隔チームとのコラボにも適しています。
- 拡張性:プラグインで機能をカスタマイズ可能。オープンソース版では自由な拡張が可能です。
検索キーワード:
ロボティクス可視化 / マルチモーダルデータ / 自律システム / ロボットログ解析 / Foxglove Studio / データ可視化 / センサーデータ / ROS / ROS2 / ロボット開発 / 自律移動 / 自動運転 / LiDAR / カメラセンサ / 3Dマッピング / デバッグツール / Foxglove / ログ解析 / スマートマシン / AIロボット / クラウド連携 / エッジコンピューティング / オープンソースツール / 開発支援ソフト
| 商品名 | 納品方法 | 納期 | 価格 |
| 電子デリバリー | お問い合わせください | お問い合わせください |
ご希望の商品にチェックを入れてボタンをクリックすることで、
該当商品をお見積もりフォームへ追加できます。
製品仕様・価格・導入手順など、お気軽にお問い合わせください
(通常、1営業日以内に回答いたします)
Foxglove Enterpriseのお問い合わせ方法
Foxglove Enterprise をご希望の際は、以下の情報をご提供ください。
いただいた内容をもとに、お見積りを作成いたします。
- Company: ライセンス登録者さまの企業名または機関名
- Name:ご担当者さまの氏名
- email:メールアドレス
- 利用ユーザー数:
※Enterpriseライセンスの最小ユーザー数は24ユーザーです。
※お知らせ※
Starter/Teamライセンスは、メーカー直販(従量課金制)のため、ユーザーさまにて直接お問い合わせください
WEBサイト内より商品を検索
「探す」ページより、ご希望の商品を検索してください。
ご希望の商品が見つかりましたら、商品名をクリックし詳細ページをご覧ください。

商品詳細ページをご確認ください
表示された商品情報をご覧いただき、商品内容やエディション、価格などをご確認ください。
ご希望の商品名のチェックボックスにチェックを入れていただくと商品名がフォームに自動入力されます。

フォームにて見積もり依頼
ここで商品名や数量、ご希望のオプションやその他のご要望、ご質問、
お客様情報など必要事項をご記入いただき、「送信する」ボタンを押してください。

弊社スタッフよりお見積もりをお送りしますので、
メールにてご注文ください
お客さまからのお問い合わせを受理しだい、弊社スタッフよりお見積もりをメールにてお送りします。
お見積もり内容をご確認後、ご注文いただけるようでしたら、弊社からのお見積もりメールへのご返信にて、ご注文の旨をお知らせください。

商品を配送、またはメールにてお届け
ハードウェア、パッケージソフトウェア等は弊社より宅配便でお届けいたします。
ご注文いただいた商品がダウンロードソフトウェアやライセンス、レポート等の場合は「電子デリバリー」にてお届けいたします。

ご注文の流れの詳細はこちら
※ 返品・交換について
海外製品のため、ご注文後のキャンセル、ご返品はお受けできません。
ただし「納品後一週間以内」の初期不良品については、正常動作の同品もしくは同等品と無償交換させていただきます。
万一在庫切れの場合は同等品交換もしくは全額返金いたします。
ユニポスはFoxglove Enterpriseの調達販売を行い、海外製品調達に関するお困りごとを解決するサービスです。 詳しくはこちら。
法人掛売り(※)
納品・請求書による後払いです。
ご注文手続きはお見積もりメールへの返信のみでけっこうです。
銀行振込
ご注文の返信メールをいただいた後、弊社指定の銀行口座へのお振込みを確認した時点で注文の確定とさせていただきます。
※法人掛売りでのお支払いについては一定の条件がございます。
お支払い方法の詳細はお見積もりメールに記載しておりますので、ご確認ください。