






オープンソースロボットハンド「Orca Hand」制作事例
: HW Builder 360 事例紹介
テガラ株式会社では研究開発者さま向けにオープンソースや設計済みハードウェアの構築サービス「HW Builder 360」を提供しております。
本ページでは当サービスの制作事例のひとつ、オープンソースロボットハンド「Orca Hand」についてご紹介いたします。
※ HW Builder 360 のサービス詳細はこちら (サービス紹介ページが開きます)

Orca Hand (https://www.orcahand.com/) は、ETHチューリッヒ、スタンフォード大学、カリフォルニア大学バークレー校といった世界有数の機関と協力し開発されたオープンソースロボットハンドです。
腱駆動型の擬人化ロボットプラットフォームで、人間の手の構造と動きを忠実に再現するように設計されています。17自由度 (指に16自由度、手首に1自由度)を備え、幅広い器用な操作タスクを可能にします。
弊社ではお客様からのご要望を受け、「Orca v1 Hand」を制作した実績がございます。
具体的にはどんなことを実施したの?
必要なパーツの調達・用意
公開されているパーツリスト (BOM) や 3Dプリントパーツのデータをもとに、弊社で Orca v1 Handの製作に必要なパーツの調達やプリントを致しました。
なお Orca v1 Hand は指先などのパーツにシリコン素材が指定されているため、これらについても弊社にてシリコン成形でパーツを用意しました。
3Dプリンタによるパーツ製作


シリコン成形 (脱泡・流し込み)

組み立て
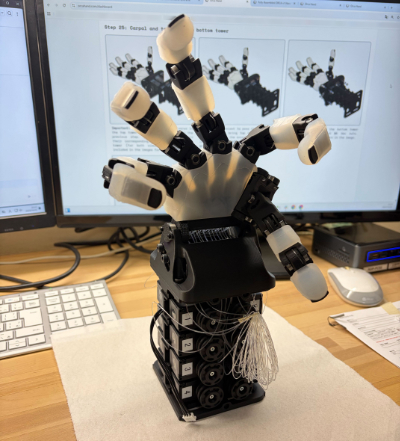
各パーツにテグスを通しながら組み立てていきます。
手の甲の組み立て および シリコン装着では、テグスの通りや摩擦を考慮しながらガイド部を微調整し、スムーズな動作が得られるようにします。 シリコン装着後も、テンションのかかり方を確認しながら再調整を行います。
手の形に組みあがり、各関節の動作の確認ができましたら、モーターを繋げていきます。
土台となるタワー部分には 17個のDynamixelモーター を配置し、各指・関節に対応する駆動系を構築します。
モーター固定部やプーリー周辺は、ネジの変更や座面の削り加工を行い、モーターの確実な固定とメンテナンス性を確保しました。
組み立て後、各モーターのID設定や動作確認を実施したうえで納品を致しました。
なお弊社にてご提供いたします 組み立て済み Orca v1 Hand の参考納期は、モーター等のパーツ調達、3Dプリントやシリコン形成、組み立てまでを踏まえ、トータルで2~3ヵ月となります。
特にご注文後に手配することになる各種パーツのメーカー在庫状況が大きく納期に影響しますので、正式な納期につきましてはお問合せください。
Orca Hand の制作をご希望の際には、お気軽にお問合せください。
下部にございます自由記入欄にて「Orca Hand」の制作をご希望の旨と必要な「台数」をお知らせいただくと、お見積りがスムーズです
オープンソースや設計済みハードウェアについて、「設計は公開されているし、必要なパーツもわかってはいるけれども、何十点も注文したりパーツを作ったりするのは大変。組立も難しい」ということはありませんか?
研究開発者さまがご自身の研究に集中できるよう、研究の前準備段階となるハードウェア構築を弊社でお手伝いいたします。お気軽にご相談ください。