




- 産業用ロボット
UFactory Lite 6
卓上サイズ 6自由度 ロボットアーム

テガラは研究開発者向けの各種サービスを提供しております。お客様の目的、ご要望に応じた最適なサービスをお選びください。
研究開発 移動 ロボット



メーカー
Clearpath Robotics Inc.
 海外製品の導入に不安のあるお客様をサポートする、年間更新のオプションサービスです。トラブル発生時の回数無制限の「メーカー問い合わせ代行」「導入後のメールサポート」や、「ハードウェア製品の保証期間延長」などのサポートパックをご用意しています。
海外製品の導入に不安のあるお客様をサポートする、年間更新のオプションサービスです。トラブル発生時の回数無制限の「メーカー問い合わせ代行」「導入後のメールサポート」や、「ハードウェア製品の保証期間延長」などのサポートパックをご用意しています。製品仕様・価格・導入手順など、お気軽にお問い合わせください
(通常、1営業日以内に回答いたします)
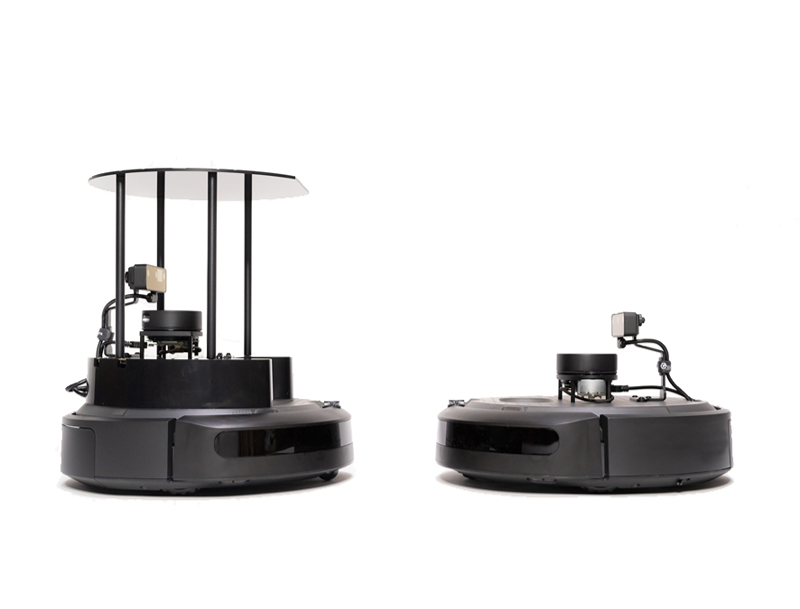
教育と研究開発を目的とした、オープンソースのモバイルロボット。
TurtleBot 4 Standard と TurtleBot 4 Lite の2モデルは、いずれも教育用ロボットiRobot Create 3がベースとなっており、ROS 2 実行のためのRaspberry Pi 4、AIを使って空間認識ができるカメラ(OAK-D)、2D LiDAR、IMUなどのセンサパックを搭載しています。
優れた演算能力と種々のセンサ、充実した入出力ポート、電源供給機能(バッテリー搭載と充電ドック)など、すべてのコンポーネントがシームレスに統合されており、 ロボット工学アプリケーションの開発をすばやく始めることができます。
ROS 2がプリインストールされたモバイルロボット。
ドキュメント、Ignition Gazebo(シミュレーション開発のためのライブラリ)、デモコード、一連のチュートリアルも備わっており、届いてすぐ使用できます。
ペイロード 9kg (最大15kg)、最高速度 0.306 m/sの性能に加え、頑丈な筐体と正確な位置特定とポジショニングが可能なベースロボット。
OAK-D空間AIステレオカメラ、2D Lidar、IMU、光学式フロアトラッキング、ホイールエンコーダ、赤外線、クリフ、バンプ、スリップ検出センサなど
USBポート、電源ブレイクアウト、上部の取り付けプレートにより、サードパーティのハードウェアやコンポーネントを統合可能。
ROS 2とmicro-ROSをサポートしています
※TurtleBotのオープンソースソフトウェア/マニュアルは こちらをご参照ください
 |
 |
|
| 項目 | TurtleBot 4 Standard | TurtleBot 4 Lite |
|---|---|---|
| Dimensions | 342 x 339 x 351 mm | 342 x 339 x 192 mm |
| Weight | 約3.9 kg | 約3.3 kg |
| Wheels (Diameter) | 72 mm | |
| Ground Clearance | 4.5 mm | |
| Max. Speed | 0.31 m/s (safe mode), 0.46 m/s (cliff sensors disabled) | |
| Max. Payload | 9 kg – Default / 15 kg – Custom Configuration | |
| Operating Time | 2.5 – 4.0 hrs (load dependent) | |
| Camera | OAK-D-PRO 4K RGB auto focus camera[IMX378] Mono stereo camera pair[OV9282] Spatial AI processor and IMU, IR etc. |
OAK-D-LITE 4K RGB auto focus camera[IMX214] Mono stereo camera pair[OV251] Spatial AI processor |
| LiDAR | RPLIDAR-A10.5-12m range, 8kHz sampling rate | |
| Accessible Power & USB Ports | Yes | No |
| OLED Display | Yes | No |
| Mounting Plate | Yes | No |
| Software | ROS 2, Ubuntu 20.04 | |
| Computer | Raspberry Pi 4B (4 GB) | |
※最新の仕様については、こちらをご参照ください
研究・開発用途を目的とした、オープンソースのモバイルロボット。
バンプセンサ、クリフセンサ、ホイール落下センサといった各種センサやプログラマブルLEDを備えており、最大速度 70cm/秒で移動します。
また、充実した入出力ポートや電源供給機能があるため、小型ボードや3Dカメラと接続し機能を拡張することが可能です。
1x Kobuki
1x Small Battery Pack
1x Charger
1x USB Cable
1x Power Cable


最大速度: 70cm/s
最大回転速度: 180deg/s (>110deg/s gyro performance will degrade)
積載量: 5kg (hard floor), 4kg (carpet)
段差-下り: will not drive off a cliff with a depth greater than 5cm
段差-登り(敷居・ラグ): climbs thresholds of 12mm or lower
稼動時間: 3/7hours (small/large battery)
充電時間: 1.5/2.6hours (small/large battery)
PC接続: USB or via RX/TX pins on the parallel port
オドメトリ: 52ticks/enc rev, 2578.33ticks/wheel rev, 11.7ticks/mm
ジャイロセンサ: factory calibrated, 1 axis (110deg/s)
バンパーセンサ: left, center, right
クリフセンサ: left, center, right
ホイール落下センサ: left, right
電源コネクタ: 5V/1A, 12V/1.5A, 12V/5A
拡張ピン: 3.3V/1A, 5V/1A, 4x analog in, 4x digital in, 4x digital out
オーディオ: several programmable beep sequences
プログラマブルLED: 2x two-coloured LED
ボタン: 3x touch buttons
ドッキングIRセンサ: left, centre, right
バッテリー: Lithium-Ion, 14.8V, 2200mAh (4S1P-small), 4400mAh (4S2P-large)
検索キーワード:
Kobuki / イグニッションガゼボ / OAK-D-PRO / OAK-D-LITE /タートルボット / クリアパスロボティクス
| 商品名 | 納品方法 | 納期 | 価格 |
| 弊社より配送 | メーカー手配中、入荷待ち | お問い合わせください | |
| 弊社より配送 | お問い合わせください | お問い合わせください |
ご希望の商品にチェックを入れてボタンをクリックすることで、
該当商品をお見積もりフォームへ追加できます。
製品仕様・価格・導入手順など、お気軽にお問い合わせください
(通常、1営業日以内に回答いたします)
「探す」ページより、ご希望の商品を検索してください。
ご希望の商品が見つかりましたら、商品名をクリックし詳細ページをご覧ください。

表示された商品情報をご覧いただき、商品内容やエディション、価格などをご確認ください。
ご希望の商品名のチェックボックスにチェックを入れていただくと商品名がフォームに自動入力されます。

ここで商品名や数量、ご希望のオプションやその他のご要望、ご質問、
お客様情報など必要事項をご記入いただき、「送信する」ボタンを押してください。

お客さまからのお問い合わせを受理しだい、弊社スタッフよりお見積もりをメールにてお送りします。
お見積もり内容をご確認後、ご注文いただけるようでしたら、弊社からのお見積もりメールへのご返信にて、ご注文の旨をお知らせください。

ハードウェア、パッケージソフトウェア等は弊社より宅配便でお届けいたします。
ご注文いただいた商品がダウンロードソフトウェアやライセンス、レポート等の場合は「電子デリバリー」にてお届けいたします。

ご注文の流れの詳細はこちら
※ 返品・交換について
海外製品のため、ご注文後のキャンセル、ご返品はお受けできません。
ただし「納品後一週間以内」の初期不良品については、正常動作の同品もしくは同等品と無償交換させていただきます。
万一在庫切れの場合は同等品交換もしくは全額返金いたします。
ユニポスはTurtleBot 4 (タートルボット)の調達販売を行い、海外製品調達に関するお困りごとを解決するサービスです。 詳しくはこちら。
納品・請求書による後払いです。
ご注文手続きはお見積もりメールへの返信のみでけっこうです。
ご注文の返信メールをいただいた後、弊社指定の銀行口座へのお振込みを確認した時点で注文の確定とさせていただきます。
※法人掛売りでのお支払いについては一定の条件がございます。
お支払い方法の詳細はお見積もりメールに記載しておりますので、ご確認ください。

UFactory Lite 6
卓上サイズ 6自由度 ロボットアーム

xArm
最大7自由度 協働 ロボットアーム

MANUS データグローブ
データグローブ ハンドトラッキング 触覚フィードバック
OpenArm Cell
視覚観測構成 標準化ワークスペース ロボット実験セル
Rokoko Full Performance Capture
全身 モーションキャプチャ・モーショントラッキングシステム
Orbbec Astra + Developer Kit
Structured Light 方式 3Dカメラ