




- ロボティクス
Gemini 330 シリーズ (Orbbec Gemini 336/336L/335/335L)
高精度 3Dスキャンデバイス カメラ

テガラは研究開発者向けの各種サービスを提供しております。お客様の目的、ご要望に応じた最適なサービスをお選びください。
19の関節数を持つロボットハンド



メーカー
qbrobotics
 海外製品の導入に不安のあるお客様をサポートする、年間更新のオプションサービスです。トラブル発生時の回数無制限の「メーカー問い合わせ代行」「導入後のメールサポート」や、「ハードウェア製品の保証期間延長」などのサポートパックをご用意しています。
海外製品の導入に不安のあるお客様をサポートする、年間更新のオプションサービスです。トラブル発生時の回数無制限の「メーカー問い合わせ代行」「導入後のメールサポート」や、「ハードウェア製品の保証期間延長」などのサポートパックをご用意しています。製品仕様・価格・導入手順など、お気軽にお問い合わせください
(通常、1営業日以内に回答いたします)
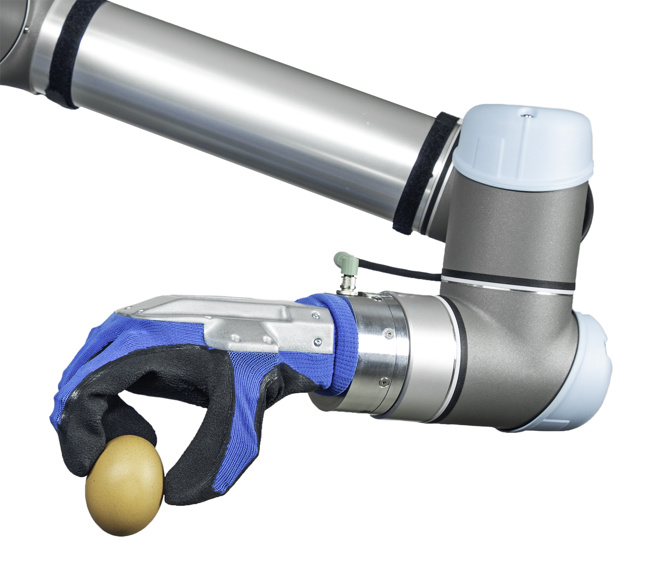
soft-robotics テクノロジーをベースとした、擬人化(anthropomorphic)ロボットハンド。
19DoFの5本の指を単一のモーター(※)で制御しており、 制御動作を変更することなく様々なオブジェクトを取り扱うことができる柔軟性と適応性を持っています。
デンマークのロボットメーカー Universal Robots のURロボットと組み合わせて使用することのできるUR+認証を受けています。
産業用タスク向けに設計された qb SoftHand Industryと、 教育分野や研究用途向けに設計された qb SoftHand Research の2種類の製品がラインアップされています。
※最新モデル qb SoftHand2 Research については2つのモーターが搭載されています
テガラ株式会社は qbrobotics社の認定リセラーとして、qb SoftHand を取り扱っております。
 ※クリックで拡大
※クリックで拡大
Tegara Corporation, of Shizuoka, Japan is official authorized agent of QB Robotics in Japan
for all sales QB SoftHand to the academic and research markets.
qb SoftHandは、人間の手の形状・機能・柔軟性を再現することを目的に開発されたロボットハンドで、生体模倣設計と劣駆動構造を特徴としています。1つのアクチュエータで多数の関節を同時に制御でき、対象物の形状に自然にフィットしながら把持できるため、複雑な制御ロジックを用いずに高い柔軟性と安全性を実現します。

産業的タスクのために設計されたロボットハンド。
産業用および協働ロボットの規格と認証に準拠しており、
主な協働ロボット(cobots)や市場の従来の産業用ロボットとの互換性があります。
また デンマークのロボットメーカー Universal Robots によるUR+認証に加え、
韓国の Doosan Robotics からもエンドエフェクタのDoosan Mate(パートナー)として挙げられています。

研究機関、教育機関、試験研究所、民間および公的企業の研究開発部門など向けに設計された
研究用途向けロボットハンド。ROSやMatlabに対応しています。
(ROSへの対応に関する詳細はこちらをご参照ください)
qb SoftHand Research には次の2種類のモデルがございます。
(2つのモデルの仕様・特徴の異なる箇所が太文字となっております)
・Flexible, Adaptive & Robust
・19 anthropomorphic DOFs, one synergy, one motor
・Dislocatable, self-healing finger joints
・Grasp force 62N (pinch configuration)
・Nominal payload 1.1kg (pinch configuration)
・From wide open to clenched fist in 1.1 s
・USB & RS485 interfaces
・ROS Compatible
・UR+ Certified by Universal Robots
・Weight: 0.77 kg
・Feedback: motor position and motor current

初代モデルと比較しより強くスマートに、そしてより多機能になった最新モデル。
第二のシナジーの導入により、手首の向きを変えることなく
人間の手との相互作用を対象としたオブジェクト操作が可能です。
また小さなものを正確につかむことも可能となりました。
・Flexible, Adaptive & Robust
・19 anthropomorphic DOFs, two synergies, two motor
・Dislocatable, self-healing finger joints
・Different closure postures: precise pinchgrasp, in-hand manipulation, pointing finger
・Nominal payload 2kg (pinch configuration)
・Nominal payload 3kg (grasp configuration)
・From wide open to clenched fist in 1 s
・USB & RS485 interfaces
・ROS Compatible
・Weight: 0.94 kg
・Feedback: motor position and motor current
※qb SoftHand2 Research 写真 (クリックで拡大します)






検索キーワード:
協働ロボット / コボット / collaborative robot / cobots / co-robot / qb SoftHand / ロボットハンド / 劣駆動ハンド / ソフトロボティクス / 人間型ハンド / 柔軟グリッパー / コンプライアント構造 / qbrobotics / マニピュレーション / 把持制御 / 人協働ロボット / ROS対応ロボットハンド / URDFモデル / 教育用ロボットハンド / 研究用ロボットハンド / サービスロボット用ハンド / 協調動作 / Python API対応 / シングルモーター駆動ハンド / 人間の手の模倣ロボット
| 商品名 | 納品方法 | 納期 | 価格 |
| 弊社より配送 | お問い合わせください | お問い合わせください | |
| 弊社より配送 | お問い合わせください | お問い合わせください | |
| 弊社より配送 | お問い合わせください | お問い合わせください |
ご希望の商品にチェックを入れてボタンをクリックすることで、
該当商品をお見積もりフォームへ追加できます。
製品仕様・価格・導入手順など、お気軽にお問い合わせください
(通常、1営業日以内に回答いたします)
「探す」ページより、ご希望の商品を検索してください。
ご希望の商品が見つかりましたら、商品名をクリックし詳細ページをご覧ください。

表示された商品情報をご覧いただき、商品内容やエディション、価格などをご確認ください。
ご希望の商品名のチェックボックスにチェックを入れていただくと商品名がフォームに自動入力されます。

ここで商品名や数量、ご希望のオプションやその他のご要望、ご質問、
お客様情報など必要事項をご記入いただき、「送信する」ボタンを押してください。

お客さまからのお問い合わせを受理しだい、弊社スタッフよりお見積もりをメールにてお送りします。
お見積もり内容をご確認後、ご注文いただけるようでしたら、弊社からのお見積もりメールへのご返信にて、ご注文の旨をお知らせください。

ハードウェア、パッケージソフトウェア等は弊社より宅配便でお届けいたします。
ご注文いただいた商品がダウンロードソフトウェアやライセンス、レポート等の場合は「電子デリバリー」にてお届けいたします。

ご注文の流れの詳細はこちら
※ 返品・交換について
海外製品のため、ご注文後のキャンセル、ご返品はお受けできません。
ただし「納品後一週間以内」の初期不良品については、正常動作の同品もしくは同等品と無償交換させていただきます。
万一在庫切れの場合は同等品交換もしくは全額返金いたします。
ユニポスはqb SoftHandの調達販売を行い、海外製品調達に関するお困りごとを解決するサービスです。 詳しくはこちら。
納品・請求書による後払いです。
ご注文手続きはお見積もりメールへの返信のみでけっこうです。
ご注文の返信メールをいただいた後、弊社指定の銀行口座へのお振込みを確認した時点で注文の確定とさせていただきます。
※法人掛売りでのお支払いについては一定の条件がございます。
お支払い方法の詳細はお見積もりメールに記載しておりますので、ご確認ください。

Gemini 330 シリーズ (Orbbec Gemini 336/336L/335/335L)
高精度 3Dスキャンデバイス カメラ

Mobile AI (Aloha Evolved)
ALOHA SLAM 物体認識対応 屋内ナビゲーション対応

Solo AI (Aloha Evolved)
ALOHA ロボットアーム AI制御 SLAM

WidowX AI (Aloha Evolved)
Trossen AI対応 6軸ロボットアーム

Stationary AI (Aloha Evolved)
Trossen Robotics 両手遠隔操作 オープンソース ロボットアーム

Libelium社製 IoT開発プラットフォーム
持続可能 産業 農業 環境 IoT ソリューション