




- 組込みAIシステム
Mobile AI (Aloha Evolved)
ALOHA SLAM 物体認識対応 屋内ナビゲーション対応 モバイルロボットプラットフォーム

テガラは研究開発者向けの各種サービスを提供しております。お客様の目的、ご要望に応じた最適なサービスをお選びください。
6軸制御 オープンソース ロボットアーム ロボットハンド


メーカー
Niryo.
 海外製品の導入に不安のあるお客様をサポートする、年間更新のオプションサービスです。トラブル発生時の回数無制限の「メーカー問い合わせ代行」「導入後のメールサポート」や、「ハードウェア製品の保証期間延長」などのサポートパックをご用意しています。
海外製品の導入に不安のあるお客様をサポートする、年間更新のオプションサービスです。トラブル発生時の回数無制限の「メーカー問い合わせ代行」「導入後のメールサポート」や、「ハードウェア製品の保証期間延長」などのサポートパックをご用意しています。製品仕様・価格・導入手順など、お気軽にお問い合わせください
(通常、1営業日以内に回答いたします)
フランス Niryo社の開発する、6軸制御の教育・研究用オープンソース・ロボットアーム。 高い精度と再現性(0.5mm)、アルミニウム構造の採用による強固さとスムーズさが備わった協働ロボットです。
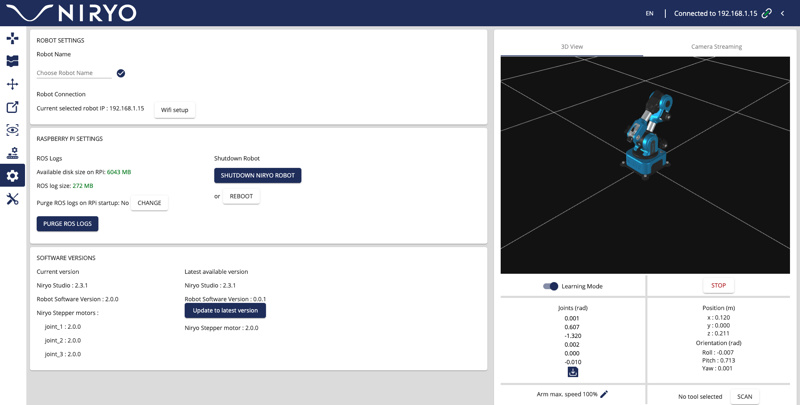
教育機関やメーカー、開発者など幅広いユーザー向けに設計されており、 ロボットを直接手で動かし動作を学習させるラーニングモードや、 Blocklyベースのオリジナルデスクトップアプリケーション(Niryo Studio)により、 プログラミングの知識がなくともロボットアームをコントロールすることが可能です (ROSやPython, C++でのプログラミングも可) 。
※エンドエフェクタパーツを付け替えることで、様々なオブジェクトを取り扱うことができます
New! (2022/3/1 追記)
最新モデル「Ned2」がリリースされました
オープンソース技術に基づく、教育、研究、Industry 4.0向け6軸制御の協働ロボット(Cobot)。
Raspberry Pi、Arduino、ROS(Robot Operating System)をベースとした構成により、柔軟かつ拡張性の高いロボット開発が可能です。精度 ±0.5mm の高い再現性、滑らかな動作を実現するアルミニウム構造を採用し、産業現場で求められる複雑な作業も忠実に再現できます。
ROS を活用することで、簡易な動作から高度な自律動作まで、多様なプログラムを構築可能。特に、生産ラインにおけるロボット導入や自動化システムのプロトタイピング(試作開発)に最適です。
※カスタムグリッパーや周辺機器を組み合わせることで、さらに多様なシナリオに対応可能です。
※Ecosystem を併せてご利用いただくのがおすすめです。



Ned2 写真 (クリックで拡大します)



Ned2 / Ned の仕様比較* 精度と再現性 : Ned は教育・研究用を目的としたロボットであるため、産業用アプリケーションの精度と堅牢性を保証していません
| Ned2 | Ned | |
| Number of axis | 6 | 6 |
| Weight | 7 kg | 6.5 kg |
| Payload | 300 g | 300 g |
| Max Reach | 440 mm | 440 mm |
| Precision | +/- 0.5 mm | 0,5 mm* |
| Repeatability | +/- 0.5 mm | 0,5 mm* |
| Power Supply | 12 Volts / 7Av | 11.1 Volts / 6A |
| Communication | GigE, WiFi 2,4GHz and 5GHz, USB2.0, USB3.0 | WiFi 2,4GHz and 5GHz, BT, USB |
| Interface/Programming | Windows/MacOS/Linux (desktop application) and APIs | |
| Materials | Aluminum, ABC-PC (injection moulding) | Aluminum, PLA (3D printing) |
| Ports | 1x Ethernet + 2x USB 3.0 + 2x USB 2.0 | |
| Hardware | Raspberry pi 4 Accelerometer and gyroscope in the control panel |
Raspberry pi 4 + 3x NiryoSteppers + 2x Dynamixel XL – 430 + 1x Dynamixel XL – 320 |
| Human-Machine interface | LED Ring, Speakers, Microphone | – |
| Collision detection sensor | Magnetic sensor (on motor) | |
Ned2 および Ned には 様々な対象を取り扱うことのできる Custom Gripper が付属します。
その他のパーツについては、別途ご購入いただくオプション品となります。
ご希望の際にはお知らせください。
※各パーツの詳細はメーカーページにてご確認ください

jaws-先端部分を自由に取り換えることが可能なグリッパー

大きなオブジェクトを掴むのに適したグリッパー

カップや卵など丸いオブジェクト および 壊れやすいオブジェクトを掴むのに適したグリッパー

掴むことが難しいオブジェクトを「吸引」により取り上げるためのパーツ
箱のふたを持ち上げたり大きく平らなオブジェクトを取り上げるのに最適

金属パーツなどを「磁力」で取り上げるためのパーツ

jaws-先端部分を自由に取り換えることが可能なグリッパー(3Dプリンタで自作したパーツも利用可能)

Custom Gripper 用の取り換えパーツ 3種類のセット

大きなオブジェクトを掴むのに適したグリッパー

カップや卵など丸いオブジェクト および 壊れやすいオブジェクトを掴むのに適したグリッパー

掴むことが難しいオブジェクトを「吸引」により取り上げるためのパーツ
箱のふたを持ち上げたり大きく平らなオブジェクトを取り上げるのに最適

金属パーツなどを「磁力」で取り上げるためのパーツ


Ned2のアーム部分に取り付けるモジュールセット。
色と形状に基づいたオブジェクトの検出や、対象物の選択機能をNed2に付与できます。
ピッキングのシミュレーションに最適な 色や形が異なるオブジェクトのセットや、Ned Custom Gripper 用のアップグレードパーツなどが含まれています。
Niryo Studio / Niryo One Studio の Blocky インターフェースを用いることで、ピッキングのような複雑な機能も、簡単に実現することができます(TCPスクリプトを使用することも可能です)。
※Ned2専用の「Vision Set – Ned2 」と、Ned と Ned2 に対応した「Vision Set」があります


生産ラインを再現することのできるベルトコンベアー。前進・後退 双方向に動かすことができ、スピード調整もできます。
なお付属するコントローラーモジュールを利用することで、Niryoシリーズ本体無しで、コンベアーを自律的に制御することも可能です。

脳波測定デバイス(EMOTIV EPOC X)による外部デバイス(Niryo NED)操作のソフトウェア設計とアーキテクチャ事例


※右:アルミニウム構造部分のイメージ前モデル
Ned 写真(クリックで拡大)






検索キーワード:
ロボット / 移動ロボット / モバイルロボット / STEAM / STEM / ロボットアーム / グリッパー / Gripper / グリッパー / Gripper
| 商品名 | 納品方法 | 納期 | 価格 |
| 電子デリバリー | お問い合わせください | お問い合わせください | |
| 弊社より配送 | お問い合わせください | お問い合わせください | |
| 弊社より配送 | お問い合わせください | お問い合わせください | |
| 弊社より配送 | お問い合わせください | お問い合わせください | |
| 弊社より配送 | お問い合わせください | お問い合わせください |
ご希望の商品にチェックを入れてボタンをクリックすることで、
該当商品をお見積もりフォームへ追加できます。
製品仕様・価格・導入手順など、お気軽にお問い合わせください
(通常、1営業日以内に回答いたします)
「探す」ページより、ご希望の商品を検索してください。
ご希望の商品が見つかりましたら、商品名をクリックし詳細ページをご覧ください。

表示された商品情報をご覧いただき、商品内容やエディション、価格などをご確認ください。
ご希望の商品名のチェックボックスにチェックを入れていただくと商品名がフォームに自動入力されます。

ここで商品名や数量、ご希望のオプションやその他のご要望、ご質問、
お客様情報など必要事項をご記入いただき、「送信する」ボタンを押してください。

お客さまからのお問い合わせを受理しだい、弊社スタッフよりお見積もりをメールにてお送りします。
お見積もり内容をご確認後、ご注文いただけるようでしたら、弊社からのお見積もりメールへのご返信にて、ご注文の旨をお知らせください。

ハードウェア、パッケージソフトウェア等は弊社より宅配便でお届けいたします。
ご注文いただいた商品がダウンロードソフトウェアやライセンス、レポート等の場合は「電子デリバリー」にてお届けいたします。

ご注文の流れの詳細はこちら
※ 返品・交換について
海外製品のため、ご注文後のキャンセル、ご返品はお受けできません。
ただし「納品後一週間以内」の初期不良品については、正常動作の同品もしくは同等品と無償交換させていただきます。
万一在庫切れの場合は同等品交換もしくは全額返金いたします。
ユニポスはNiryo Ned2の調達販売を行い、海外製品調達に関するお困りごとを解決するサービスです。 詳しくはこちら。
納品・請求書による後払いです。
ご注文手続きはお見積もりメールへの返信のみでけっこうです。
ご注文の返信メールをいただいた後、弊社指定の銀行口座へのお振込みを確認した時点で注文の確定とさせていただきます。
※法人掛売りでのお支払いについては一定の条件がございます。
お支払い方法の詳細はお見積もりメールに記載しておりますので、ご確認ください。

Mobile AI (Aloha Evolved)
ALOHA SLAM 物体認識対応 屋内ナビゲーション対応 モバイルロボットプラットフォーム

Solo AI (Aloha Evolved)
ALOHA ロボットアーム AI制御 SLAM

Stationary AI (Aloha Evolved)
Trossen Robotics 両手遠隔操作 ロボットアーム
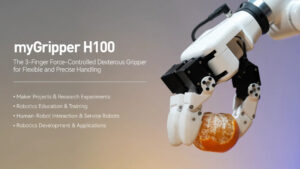
myGripper H100(Pro 630/Mercury シリーズ)
電動グリッパー 把持制御 ロボットハンド

WidowX AI (Aloha Evolved)
Trossen AI対応 6軸ロボットアーム
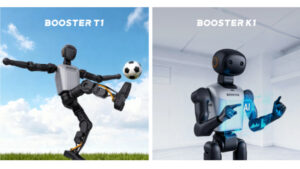
Booster T1 / Booster K1
軽量で柔軟な ヒューマノイドロボット (開発者向け/教育用途向けモデル)