




- 医用画像工学
Gemini 330 シリーズ (Orbbec Gemini 336/336L/335/335L)
高精度 3Dスキャンデバイス カメラ

テガラは研究開発者向けの各種サービスを提供しております。お客様の目的、ご要望に応じた最適なサービスをお選びください。
7自由度ロボットアーム ヒューマノイドロボット
メーカー
Elephant Robotics
 海外製品の導入に不安のあるお客様をサポートする、年間更新のオプションサービスです。トラブル発生時の回数無制限の「メーカー問い合わせ代行」「導入後のメールサポート」や、「ハードウェア製品の保証期間延長」などのサポートパックをご用意しています。
海外製品の導入に不安のあるお客様をサポートする、年間更新のオプションサービスです。トラブル発生時の回数無制限の「メーカー問い合わせ代行」「導入後のメールサポート」や、「ハードウェア製品の保証期間延長」などのサポートパックをご用意しています。製品仕様・価格・導入手順など、お気軽にお問い合わせください
(通常、1営業日以内に回答いたします)
中国 Elephant Robotics 社の開発した、軽量ロボットアームを搭載したヒューマノイドロボットシリーズ。
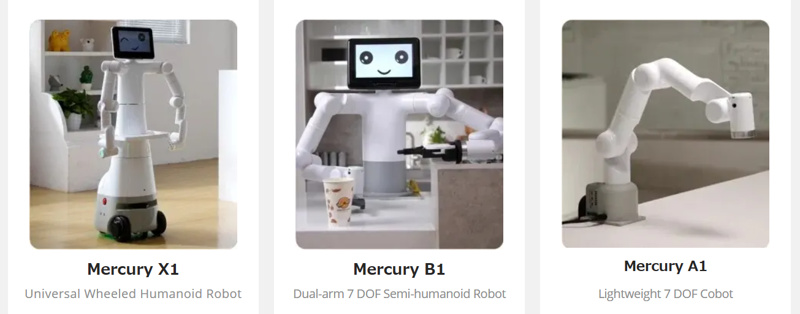
以下3種類の製品がラインアップされています。
Mercury Robot シリーズ 共通のロボットアームには、 Elephant Robotics 社が独自開発したハーモニック・ドライブ・モジュール(「Power Spring」シリーズ) が 7個搭載されています (7自由度)。 またカーボンファイバー製のシェルにより、アーム1台(Mercury A1)あたり約3.5Kg の軽量化を実現しています。
Mercury Humanoid Robot Series 詳細 (メーカーWEBサイト)

| Product Size | 98*128*640mm |
| Working Voltage | 24V |
| Degree of Freedom | 7DOF |
| Maximum Working Radius | 450mm |
| Maximum Payload | 1KG |
| Net Weight | 3.5KG |
| Repeatability | ± 0.05mm |
| Material | Carbon fiber, Aluminum alloy, Engineering plastics |
| Reduction Mechanism | Harmonic Reducer |
| Joint Brake | Electromagnetic friction plate |
| Main Controller CPU | Quad-core ARM Cortex-A72 ARMv8 64Bit SoC@1.5GHz |
| IO | 24V 6 Input, 6 Output |
| Communication | CAN Bus/WIFI/Network port/Bluetooth/USB serial port |
※こちらの情報は2024年9月時点のメーカーWEBの情報を元にしています
| Product Size | 200*192.5*537mm |
| Working Voltage | 24V |
| Degree of Freedom | 17DOF |
| Maximum Working Radius | 450mm |
| Maximum Payload | 1KG |
| Net Weight | 8KG |
| Repeatability | ± 0.05mm |
| Reduction Mechanism | Harmonic Reducer |
| Joint Brake | Electromagnetic friction plate |
| Main Controller CPU | 6-Core Arm v8.2 64-bit CPU |
| Main Controller GPU | 384-Core Volta architecture GPU |
| Computing Power | 21 TOPS |
| Screen | 9-inch Touching Screen |
| Material | Carbon fiber, Aluminum alloy, Engineering plastics |
| 3D Camera | Orbbec Deeyea |
| Microphone | Line array 4 microphones,5m 180° pickup |
| IO | 24V 6 Input, 6 Output |
| Communication | CAN Bus/WIFI/Network port/Bluetooth/USB serial port |
※こちらの情報は2024年9月時点のメーカーWEBの情報を元にしています
| Product Height | 1.18m |
| Working Voltage | 24V |
| Degree of Freedom | 19DOF |
| Battery life | 8 hours |
| Maximum Payload | 1KG |
| Net Weight | 55KG |
| Repeatability | ± 0.05mm |
| Drive Motor | High performance direct drive motors |
| Maximum Operating Speed | 1.2m/s |
| Maximum Climbing Angle | 15° |
| Storage Space | 15L |
| Main Controller GPU | 6-Core Arm v8.2 64-bit CPU,384-Core Volta GPU |
| Computing Power | 21 TOPS |
| Main Controller CPU | 4-Core ARM Cortex-A57 CPU |
| Mobile Base Controller | 128 NVIDIA CUDA cores |
| Screen | 9-inch Touching Screen |
| Mobile Sensors | LIDAR, Ultrasonic Radar, 2D Vision |
| 3D Camera | Orbbec Deeyea |
| Microphone | Line array 4 microphones,5m 180° pickup |
| IO | 24V 6 Input, 6 Output |
| Communication | CAN Bus/WIFI/Network port/Bluetooth/USB serial port |
※こちらの情報は2024年9月時点のメーカーWEBの情報を元にしています
各グリッパーとサクションポンプの仕様については以下をご参照ください
| Flexible Gripper | Adaptive Gripper | Parallel Gripper | Suction Pump | |
| Max Payload | 1kg | 1kg | 1kg | 1kg |
| Max Range | 200mm | 120mm | 50mm | – |
| Controlling | CAN; IO | CAN; IO | CAN; IO | – |
| Torque Feedback | Support | Support | Support |
Support
|

軽量の7DoF協働ロボットアーム。
最大ペイロード 1kg、最大作業範囲 450mm、再現性 ± 0.05mm の性能を持っています。
シングルマスター制御とデュアルスレーブ制御方式を採用しており、
メインコントローラーは Cortext A72 – 1.5GHz です。
また本体に 2.0インチのタッチスクリーンを搭載しており、
Elephant Robotが独自に開発した「myPanel OS」のインターフェースにより、
プログラミングなしで迅速な配備と応用を実現します。

2つのロボットアームを備えたセミ・ヒューマノイドロボット。
Mercury A1 2台を搭載した合計17自由度を持っており、
片腕の独立操作、及び両腕の協調操作が可能です。
頭部には9インチ高精細LCDタッチスクリーンが搭載されており、
マルチポイント制御やユーザーカスタマイズによる表情表示に対応します。
メイン制御モジュール NVIDIA Jetson Xavierと統合された3Dカメラにより、
2D/3Dマシンビジョンガイド、掴み、VR遠隔操作が可能です。
またMercury B1は ChatGPT for Roboticsに適応しており、
リアルタイム音声収集をサポートする高解像度マイクアレイを内蔵し、
AI音声インテリジェント認識インタラクションの新しい体験をもたらします。

2つのロボットアームと移動のためのモバイルベースを備えた汎用ヒューマノイドロボット。
Mercury B1 と高性能モバイルベースで構成されており、合計19自由度を持っています。
マシン全体で、NVIDIA Jetson XviaerとJeston Nanoデュアルメインコントローラーを搭載しています。
モバイルベースは、高性能 LiDAR、超音波センサ、2Dビジョンなど豊富な知覚を備えており、
最大動作速度1.2m/sのダイレクトドライブモーターで駆動し、最大で2cmの高さ、15度の角度まで登ることができます。
バッテリー寿命は最大8時間で、配膳ロボットや遠隔操作等の用途に対しても、信頼性の高いモバイル運用が可能です。

3種類のグリッパー、サクションポンプ、2D/3Dカメラ用のフランジといった、
アームの尖端に取り付ける各種アクセサリが用意されています (オプション)
検索用キーワード :
Mercury Robot Series / マーキュリー ロボット / 7軸ロボットアーム / モバイルロボット / SLAM / 双腕ロボット / ChatGPT for Robotics / Wheeled Humanoid Robot / Blockly / Raspberry Pi / Embodied AI / harmonic drive modules / ハーモニックドライブモジュール
| 商品名 | 納品方法 | 納期 | 価格 |
| 弊社より配送 | お問い合わせください | お問い合わせください | |
| 弊社より配送 | お問い合わせください | お問い合わせください | |
| 弊社より配送 | お問い合わせください | お問い合わせください | |
| 弊社より配送 | お問い合わせください | お問い合わせください |
ご希望の商品にチェックを入れてボタンをクリックすることで、
該当商品をお見積もりフォームへ追加できます。
製品仕様・価格・導入手順など、お気軽にお問い合わせください
(通常、1営業日以内に回答いたします)
「探す」ページより、ご希望の商品を検索してください。
ご希望の商品が見つかりましたら、商品名をクリックし詳細ページをご覧ください。

表示された商品情報をご覧いただき、商品内容やエディション、価格などをご確認ください。
ご希望の商品名のチェックボックスにチェックを入れていただくと商品名がフォームに自動入力されます。

ここで商品名や数量、ご希望のオプションやその他のご要望、ご質問、
お客様情報など必要事項をご記入いただき、「送信する」ボタンを押してください。

お客さまからのお問い合わせを受理しだい、弊社スタッフよりお見積もりをメールにてお送りします。
お見積もり内容をご確認後、ご注文いただけるようでしたら、弊社からのお見積もりメールへのご返信にて、ご注文の旨をお知らせください。

ハードウェア、パッケージソフトウェア等は弊社より宅配便でお届けいたします。
ご注文いただいた商品がダウンロードソフトウェアやライセンス、レポート等の場合は「電子デリバリー」にてお届けいたします。

ご注文の流れの詳細はこちら
※ 返品・交換について
海外製品のため、ご注文後のキャンセル、ご返品はお受けできません。
ただし「納品後一週間以内」の初期不良品については、正常動作の同品もしくは同等品と無償交換させていただきます。
万一在庫切れの場合は同等品交換もしくは全額返金いたします。
ユニポスはMercury Humanoid Robot Seriesの調達販売を行い、海外製品調達に関するお困りごとを解決するサービスです。 詳しくはこちら。
納品・請求書による後払いです。
ご注文手続きはお見積もりメールへの返信のみでけっこうです。
ご注文の返信メールをいただいた後、弊社指定の銀行口座へのお振込みを確認した時点で注文の確定とさせていただきます。
※法人掛売りでのお支払いについては一定の条件がございます。
お支払い方法の詳細はお見積もりメールに記載しておりますので、ご確認ください。

Gemini 330 シリーズ (Orbbec Gemini 336/336L/335/335L)
高精度 3Dスキャンデバイス カメラ

Mobile AI (Aloha Evolved)
ALOHA SLAM 物体認識対応 屋内ナビゲーション対応

Solo AI (Aloha Evolved)
ALOHA ロボットアーム AI制御 SLAM

Stationary AI (Aloha Evolved)
Trossen Robotics 両手遠隔操作 オープンソース ロボットアーム

Libelium社製 IoT開発プラットフォーム
持続可能 産業 農業 環境 IoT ソリューション

LEGO MINDSTORM
自立型ロボット作成キット