学会で紹介しきれなかった出展製品情報 | Tegara / UNIPOS

学会出展レポート

弊社は 2025年9月2日〜5日 第43回日本ロボット学会学術講演会、および
9月8日〜11日 電子情報通信学会 ソサイエティ大会 にて、Elephant Robotics社 MyArm と
カリフォルニア大学バークレー校開発の GELLO を展示しました。
本ページでは、学会会場でご紹介しきれなかった製品情報をまとめています。研究・開発のご参考になれば幸いです。
ご質問・お見積りのご依頼は、下記フォームからお気軽にどうぞ
展示製品について
myArm | ROS/Python対応の低価格ロボットアーム

Elephant Robotics社製のmyArmは、小型・軽量ながら6自由度を備えたアーム型ロボットです。
ROSやPythonに対応し、画像認識や機械学習と組み合わせて多様なタスクを自動化できます。教育用途からAI・ロボティクス研究まで幅広く活用可能です。
主な特徴
- 6自由度アーム:小型・軽量ながら多関節構造を実現
- ROS・Python対応:既存ライブラリ活用で開発期間を短縮
- 画像認識・機械学習連携:ピッキングや検査の自動化が可能
- 低価格で導入障壁が低い:複数台導入や分散協調制御に適応
活用シーン
- 大学・研究機関でのAI・ロボティクス研究
- 教育現場でのプログラミング学習
- 産業用途での自動化実験・検証
myArmは、研究開発を加速させる強力なツールです。
GELLO | オープンソースロボットアーム
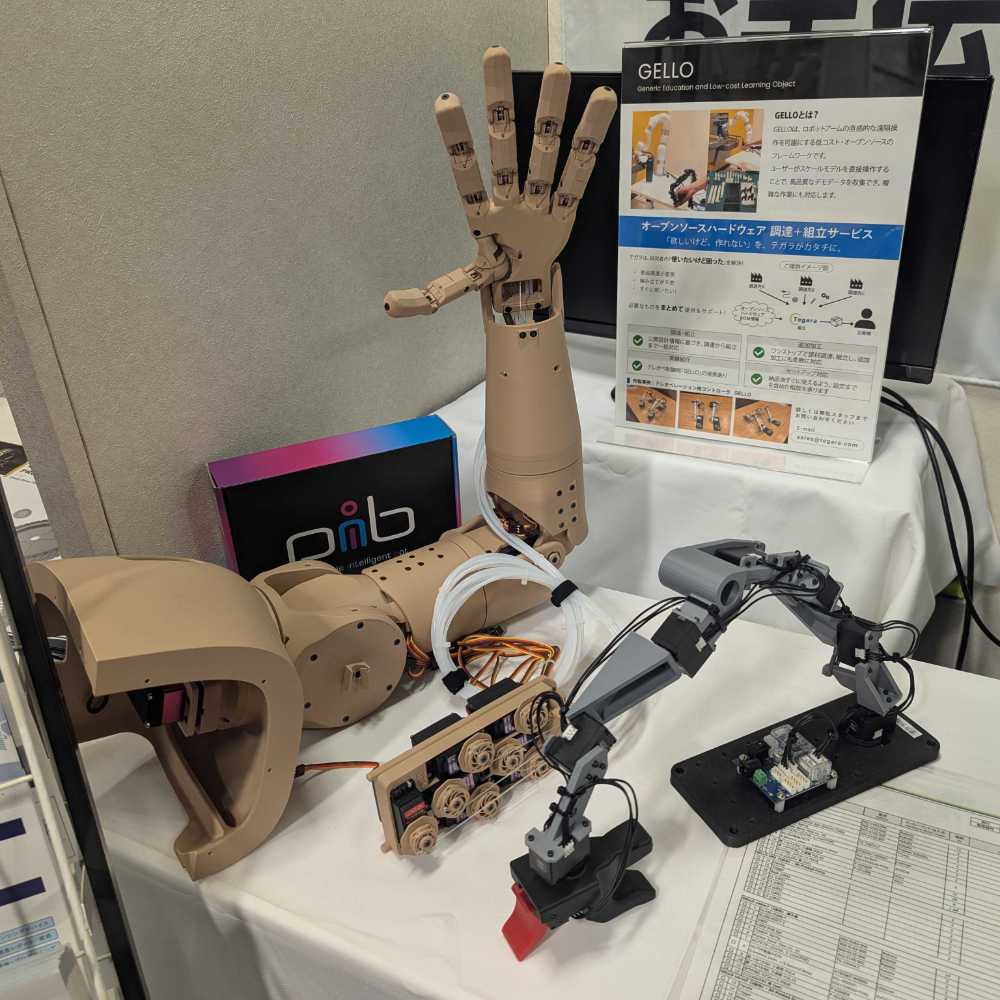
GELLOは、ジェスチャと自然言語を組み合わせてロボットを直感的に操作できるインタフェースです。
ROS環境に完全対応し、既存システムへの組み込みも容易。プログラミング知識が浅いユーザーでも高度な操作が可能です。
主な特徴
- 直感的操作:ジェスチャ+自然言語でロボットを制御
- ROS完全対応:既存ロボットシステムへの統合が容易
- 初心者にも対応:高度な操作を簡便に実現
- xArmシリーズと連携:特に「xArm7」は高可動性+0.02mm精度
- 導入しやすい価格帯:協働ロボットの実践導入に好適
活用シーン
- 遠隔地での繊細な作業や複雑な動作の再現
- 研究室・開発現場での直感的インタフェース検証
- 教育現場での次世代ロボット操作体験
GELLOとuFactory「xArmシリーズ」を組み合わせることで、遠隔地でも複雑かつ繊細な作業を実現できます。
弊社ではxArmシリーズの取り扱い実績も豊富です。詳細は以下よりご覧ください。
弊社では、GELLOをはじめとした、オープンソースハードウェアプロジェクトに対する充実・柔軟なサポートも行っております。「HW (Hardware) Builder 360」の詳細は以下よりご覧ください。
学会での反響
ブースには大学や企業の研究者・学生の方々に多数お立ち寄りいただきました。特に myArmの手軽な操作性や、GELLO × xArmによる直感的制御には高い関心が寄せられ、 その場で具体的な研究用途のご相談を多くいただきました。
研究支援の最新情報をお届けします
弊社では、技術セミナーやオンライン相談会を通じて、最新のロボティクス研究支援製品をご紹介しています。 「最新の導入事例を知りたい」「研究環境に合わせた提案を受けたい」など、お気軽にご相談ください。
AI/ロボティクス研究・開発関連製品のご紹介
展示製品以外にも、AI/ロボティクス研究・開発関連の製品を取り扱っております。詳細は以下の一覧をご覧ください。
Orbbec社 高精度3Dビジョンセンサー

Femtoシリーズ:
ToF方式の3Dカメラ。高精度深度データ・高速フレームレート・グローバルシャッター(一部)に対応。NVIDIA Jetson等と連携し、ピッキング・組立・AR/VR・産業検査・医療・体積測定で力を発揮します。
Astraシリーズ:
構造化光方式の3Dカメラ。RGB+深度を同時取得でき、ナビゲーション、物体認識、ジェスチャ認識、教育、AIoT研究などに最適です。
関連ソフトウェア
Unity:研究開発を加速するリアルタイム3Dプラットフォーム
Unityはゲーム開発エンジンとして広く知られていますが、近年ではAI・ロボティクス分野においてもその活用が急速に進んでいます。リアルタイム3D環境の構築を容易にし、AIエージェントのトレーニング、ロボットの動作シミュレーション、HMI(ヒューマン・マシン・インターフェース)開発など、多様な研究開発ニーズに対応可能です。
研究現場では、
- 「実機による検証に時間・コストがかかる」
- 「複雑なセンサーや多関節の挙動を再現するのが困難」
といった課題がしばしば発生します。Unityはこうした課題に対し、仮想環境での事前検証を可能にすることで、試作の手戻りを削減し、限られたリソースでも効率的な研究推進を支援します。
RoboDK:自律制御アルゴリズムの検証を加速するロボットシミュレーション環境
RoboDKは、オフラインロボットプログラミング(OLP)に対応し、500種類以上のロボットモデルを扱える高機能なシミュレーションツールです。豊富なPython APIを備え、強化学習(RL)や生成AIと連携した自律制御アルゴリズムを仮想ロボットとシームレスに統合できます。これにより、データ駆動型の迅速なプロトタイピングとアルゴリズム検証が可能になります。
研究現場では、
- 「実機が少なく同時に試験できない」
- 「誤動作による設備リスクが大きい」
といった制約が課題となります。RoboDKはこれらの問題をシミュレーション環境で解決し、アルゴリズムの完成度を高めたうえで、安全かつ効率的に実機へ移行することを可能にします。
その他
DirectDriveTechnology社製品:動的バランス制御を支える次世代ロボットプラットフォーム
DirectDriveTechnology社製のTITAおよびDiabloは、動的バランス制御や倒立歩行の研究を加速させる次世代型ロボットです。堅牢な設計と高い再現性を備えており、転倒リスクや高コストといった実機検証の課題に対して、安全かつ効率的なアルゴリズム検証を可能にします。
また、人間に近い複雑な動作を低コストで試行可能なため、教育用途から高度な研究開発まで幅広く活用されています。実機ベースのリアルな検証環境を提供することで、仮想環境とのハイブリッドな研究設計にも対応可能です。

2025年9月の第43回日本ロボット学会学術講演会では、香港DirectDriveTechnology社も出展しました。
同社の「TITA」「Diablo」は弊社で取り扱っております。ご興味がありましたらぜひお問い合わせください。
製品やサービスに関するご相談は、下記フォームよりお気軽にお問い合わせください