ロボットアームの活用シーン・導入メリット

本ページでは、教育・研究・AI検証・HCI などの活用シーン、導入のメリット、そして すぐに試せる研究テーマ別の構成例をまとめてご紹介します。詳細セクションは下の目次からどうぞ。
導入目的から探す:教育・研究・応用・実装
研究内容や教育レベル、開発ステージに合わせて最適な導入構成をお手伝いします。
詳細は下の研究テーマ別の構成例もご参照ください。
|
教育・基礎研究向け 授業・実習・ROS入門に適す |
応用研究・製品検証向け AI・ビジョン・多軸制御を活用した応用研究に最適 |
|
発展研究・拡張導入 デジタルツイン・HCI等を拡張。視線×ロボット実験も可能 |
実装・システム統合向け 複数機器の連携やAI制御を含む、実装・統合フェーズに |


活用シーン(例)
研究・教育・開発の現場で“どう使えるか”を具体例で整理します。
導入メリット(要点)
導入後に実感できる価値を、再現性・拡張性・コスト最適化の観点で整理します。
研究テーマ別の構成例
モデル・ソフト・デバイスの組み合わせ例を、代表的なテーマでご紹介します。
以下はほんの一例です。ご不明点がございましたら、お気軽にご相談ください。
| 研究テーマ例 | 推奨モデル例 | 推奨ソフト(役割) | 推奨デバイス(種類) |
|---|---|---|---|
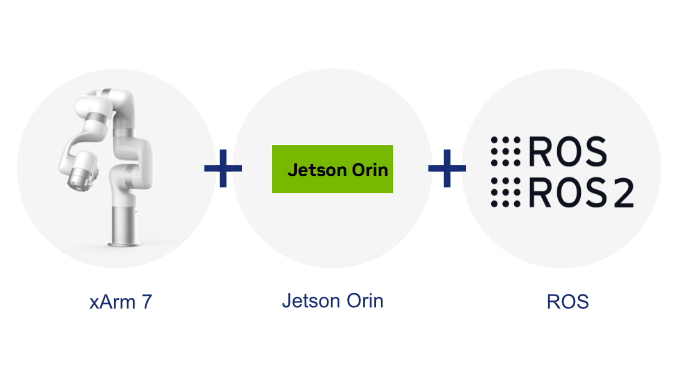
| 精密ピック&プレース / AI検証 | ・xArm7 ・myCobot Pro 630 |
RoboDK(オフラインプログラミング) Foxglove Studio(ROSログ可視化/デバッグ) |
Orbbec Gemini(中距離3D/深度) RealSense D400シリーズ(深度・距離データ) |
| 強化学習 / 物理ベース制御 | ・xArm7 ・myCobot Pro 630 |
MuJoCo(物理シミュレーション) Foxglove Studio(センサ・制御ログ可視化) |
RealSense D400シリーズ(深度カメラ) |
| 教育・基礎研究(授業運用) | ・myArm 300 Pi ・Niryo Ned2 |
RoboDK(演習/シミュレーション) Niryo Studio(教育UI・ブロック/スクリプト) |
Orbbec Astra(入門?教育向け3D/Depth) |
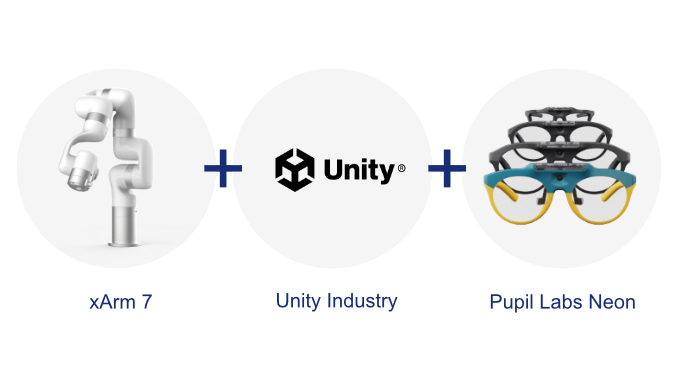
| デジタルツイン / 仮想検証 | ・xArm7 ・myCobot Pro 630 |
Unity Industry(可視化/デジタルツイン) RoboDK(経路生成・実機橋渡し) |
Orbbec Gemini(3Dセンシング) |
| HCI / 認知研究(視線計測 等) | ・Niryo Ned3 Pro | Foxglove Studio(実験ログ可視化) | Pupil Labs Neon(視線トラッキング) |
研究内容に応じたハードウェア・ソフトウェア構成をご提案します。
用途やご希望の環境に合わせて、最適な組み合わせをご案内します。
要件が固まっていなくても構いません。お気軽にご相談ください。
関連開催中キャンペーン
過去にテガラをご利用いただいたお客様を対象とした「AI ロボティクス製品 特価キャンペーン」実施中!
ロボットアームや3Dカメラなど人気メーカー20社の製品が対象です
テガラが選ばれる理由
- 研究特化のラインアップ:AI・ロボティクス・計測・ビジョンまで、研究用途に最適化された製品を厳選
- 導入〜活用まで伴走:要件整理、セットアップ、運用相談まで、専任スタッフが継続サポート
- 実績と信頼:大学・企業での導入と学会での経験を活かし、現場課題に寄り添う提案
フォームが難しい場合は、直接メールをお送りください。