





- 産業用アーム
UFACTORY 850
高性能 6自由度(6DOF) ロボットアーム

テガラは研究開発者向けの各種サービスを提供しております。お客様の目的、ご要望に応じた最適なサービスをお選びください。
物理演算 エンジン ソフトウェア
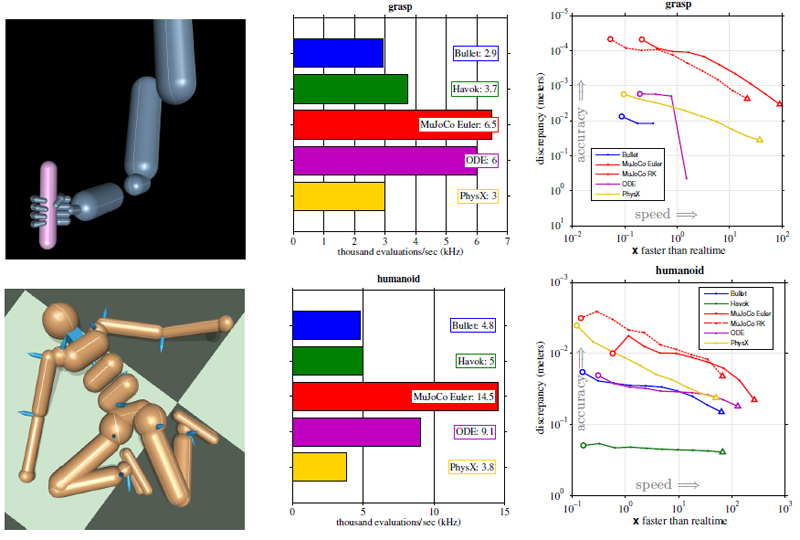
米国ワシントン大学 移動制御研究室の研究者 Emo Todorov氏によって開発された物理エンジン。
MuJoCoの名称は Multi-Joint dynamics with Contact を意味しており、特に接触(接点)のある多関節の動力学シミュレーションに適しています。
XMLパーサ、モデルコンパイラ、シミュレーター、インタラクティブなOpenGLビジュアライザを含んだ、C/C++ APIのダイナミックライブラリです。各種無償プラグインも用意されています。
同研究室ではロボティクス分野での制御シミュレーションにMuJoCoが活用されていますが、他にも汎用シミュレータとして、生体力学、グラフィックス、アニメーション、機械学習など様々な分野での活躍が期待されています。
詳細はメーカーサイトの Overviewをご覧ください
※最新版 MuJoCo 2.0がリリースされました(2018.10.1)
前Ver. MuJoCo 1.5と比べ シミュレーション速度が20~80%ほど向上しました。詳細はこちら
※追記(2021.11.2)
MuJoCo は DeepMind 社に買収され、Apache2.0 ライセンスのもとで 誰でも無料でご利用いただけることになりました(October 2021)。
MuJoCo は 今後は GitHub 上でオープンソース化されますが、 現行の有償ライセンスは、満了期間まで Roboti社が引き続きサポートいたします。

ロボット関連製品の一覧はこちらInstitutional License
Unlike the Trial and Personal licenses whose activation keys are hardware-locked, here the activation keys are unlocked.
(Institutional Licenseの利用可能なコンピュータ台数はライセンスの種類によって異なります)

※MuJoCo は DeepMind 社に買収され、Apache2.0 ライセンスのもとで誰でも無料でご利用いただけることになりました(October 2021)。
※無償ライセンスの有効期限は2031年10月18日です。
お問い合わせの際にはご希望のライセンス形態をお知らせください。
それぞれのライセンスの条件・詳細については こちらのページ をご覧ください。
MuJoCo Personal License : 1 year ※取り扱い終了
個人向けライセンス
MuJoCo Institutional License : 1 year ※取り扱い終了
機関向けライセンス
Personal Licenseについてはご購入に際し特に制限はありませんが、
Institutional Licenseのご購入にはソフトウェア使用許諾契約書へのサインが必要となります。
また、アクティベーションキーの扱いについて以下のような違いがあります。
The activation keys are hardware-locked.
The licensed user may use the software on up to 3 computers for Non-commercial and Commercial licenses, and one computer for Student licenses.
※以下のMuJoCo用 無償プラグインもメーカーより提供されています
MuJoCoをフル機能のGUIを備えたGazeboのような汎用シミュレータとして利用するためのプラグイン。
DARPA Hand Proprioception & Touch Interfaces (HAPTIX) プログラムに向けにカスタマイズされたシミューレタとしても利用可能です。
MuJoCoをUnityのシミュレータに置き換え、Unityのレンダリング機能を利用するためのプラグイン
HTC Viveを用いた対話型仮想環境構築のためにMuJoCoをOpenVRツールキットと結合するためのプラグイン
※ 将来的にOculus Riftへの対応も検討されています
※ 各プラグインの詳細・ダウンロードはこちらのメーカーページをご覧ください
MuJoCo Documentation (メーカーページ) MuJoCo Download (メーカーページ)| 商品名 | 納品方法 | 納期 | 価格 |
| 別途 (※) | お問い合わせください | お問い合わせください |
ご希望の商品にチェックを入れてボタンをクリックすることで、
該当商品をお見積もりフォームへ追加できます。
製品仕様・価格・導入手順など、お気軽にお問い合わせください
(通常、1営業日以内に回答いたします)
「探す」ページより、ご希望の商品を検索してください。
ご希望の商品が見つかりましたら、商品名をクリックし詳細ページをご覧ください。

表示された商品情報をご覧いただき、商品内容やエディション、価格などをご確認ください。
ご希望の商品名のチェックボックスにチェックを入れていただくと商品名がフォームに自動入力されます。

ここで商品名や数量、ご希望のオプションやその他のご要望、ご質問、
お客様情報など必要事項をご記入いただき、「送信する」ボタンを押してください。

お客さまからのお問い合わせを受理しだい、弊社スタッフよりお見積もりをメールにてお送りします。
お見積もり内容をご確認後、ご注文いただけるようでしたら、弊社からのお見積もりメールへのご返信にて、ご注文の旨をお知らせください。

ハードウェア、パッケージソフトウェア等は弊社より宅配便でお届けいたします。
ご注文いただいた商品がダウンロードソフトウェアやライセンス、レポート等の場合は「電子デリバリー」にてお届けいたします。

ご注文の流れの詳細はこちら
※ 返品・交換について
海外製品のため、ご注文後のキャンセル、ご返品はお受けできません。
ただし「納品後一週間以内」の初期不良品については、正常動作の同品もしくは同等品と無償交換させていただきます。
万一在庫切れの場合は同等品交換もしくは全額返金いたします。
ユニポスはMuJoCoの調達販売を行い、海外製品調達に関するお困りごとを解決するサービスです。 詳しくはこちら。
納品・請求書による後払いです。
ご注文手続きはお見積もりメールへの返信のみでけっこうです。
ご注文の返信メールをいただいた後、弊社指定の銀行口座へのお振込みを確認した時点で注文の確定とさせていただきます。
※法人掛売りでのお支払いについては一定の条件がございます。
お支払い方法の詳細はお見積もりメールに記載しておりますので、ご確認ください。



