




- 産業用ロボット
xArm
最大7自由度 協働 ロボットアーム

テガラは研究開発者向けの各種サービスを提供しております。お客様の目的、ご要望に応じた最適なサービスをお選びください。
操作性の探求 ベンチマーク取得 9自由度 ロボット
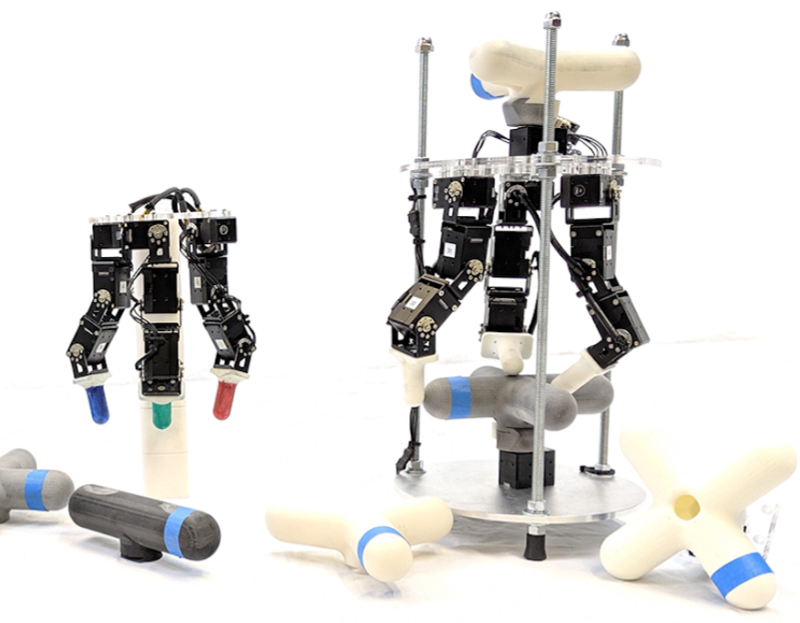
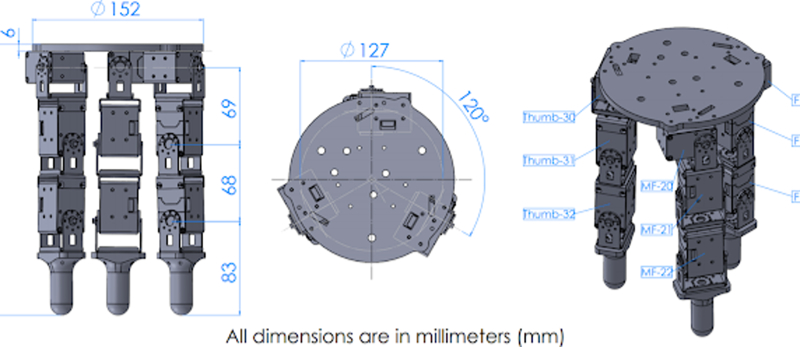
D’Clawは、円形のレーザーカットベースを中心に、対称的な3つのフィンガーを備えた 堅牢で低コスト、かつ簡単に組み立てることができる9自由度のロボットです。
Google Brain Teamにより開発されたベンチマーク用ロボット ROBEL (Robotics Benchmarks for Learning)の一つで、 指先での複雑で器用な操作や制御の学習のためのベンチマークを取得することができます。
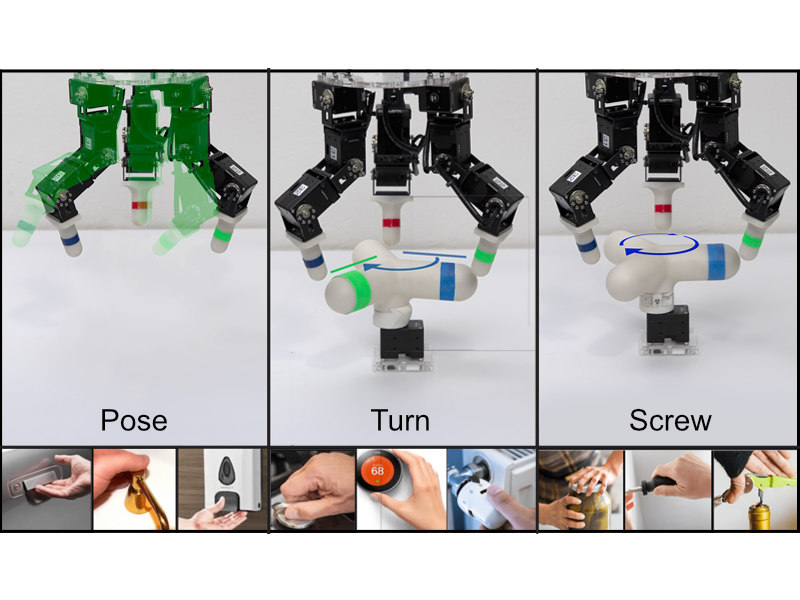
D’Clawでは、主に3つの操作動作(ポーズ、回転、ねじる)を観察できます。 また様々なシミュレーションに対応しており、深層強化学習とデモンストレーションによる操作性を探求するための学習に適しています。

移動運動性能探求のための D’Kitty、操作性探求のための D’Claw は 販売中止となりました(2022年6月)。
ROBEL オープンソース プラットフォーム / 詳細
D’Claw / 詳細
動作/シミュレーション環境:

(左)Pose – 形状適合 (中央)Turn – 指定角度に回転 (右)Screw – 連続的な回転
*1 Demo Augmented Policy Gradients (DAPG)を使用したハードウェアトレーニングによる有効学習
*2 物理演算エンジンソフトウェア MuJoCo もお取り扱いございます
*3 Soft Actor-Critic(SAC)を使用したハードウェアトレーニングによる有効学習
D’Claw (パーツのみ)
D’Claw (組み立て済み完成品)
* 注意事項 *
※一部、パーツの自作が必要となります
パーツのみの場合は、追加の3Dプリントパーツ / レーザーカットパーツ が必要となります。
詳細についてはこちらから / D’Claw Parts and Assembly Files
検索キーワード; DAPG / Demo Augmented Policy Gradients / ROBEL Robotic / RObotics BEnchmarks for Learning / Sim2Real / MuJoCo simulation / D’Kitty / ベンチマークロボット / Soft Actor-Critic
ROBEL (RObotics BEnchmarks for Learning)(開発元 Google AI) Google AI blog (開発元 Google AI) D'Claw Benchmarks(開発元 Google AI) UC Berkeley と University of Washington による、D'Claw が用いられた マルチタスク学習によるリセットフリーの強化学習に関する論文と研究発表 (英語WEBサイト)| 商品名 | 納品方法 | 納期 | 価格 |
| 弊社より配送 | 販売中止 | お問い合わせください | |
| 弊社より配送 | 販売中止 | お問い合わせください |
ご希望の商品にチェックを入れてボタンをクリックすることで、
該当商品をお見積もりフォームへ追加できます。
製品仕様・価格・導入手順など、お気軽にお問い合わせください
(通常、1営業日以内に回答いたします)
「探す」ページより、ご希望の商品を検索してください。
ご希望の商品が見つかりましたら、商品名をクリックし詳細ページをご覧ください。

表示された商品情報をご覧いただき、商品内容やエディション、価格などをご確認ください。
ご希望の商品名のチェックボックスにチェックを入れていただくと商品名がフォームに自動入力されます。

ここで商品名や数量、ご希望のオプションやその他のご要望、ご質問、
お客様情報など必要事項をご記入いただき、「送信する」ボタンを押してください。

お客さまからのお問い合わせを受理しだい、弊社スタッフよりお見積もりをメールにてお送りします。
お見積もり内容をご確認後、ご注文いただけるようでしたら、弊社からのお見積もりメールへのご返信にて、ご注文の旨をお知らせください。

ハードウェア、パッケージソフトウェア等は弊社より宅配便でお届けいたします。
ご注文いただいた商品がダウンロードソフトウェアやライセンス、レポート等の場合は「電子デリバリー」にてお届けいたします。

ご注文の流れの詳細はこちら
※ 返品・交換について
海外製品のため、ご注文後のキャンセル、ご返品はお受けできません。
ただし「納品後一週間以内」の初期不良品については、正常動作の同品もしくは同等品と無償交換させていただきます。
万一在庫切れの場合は同等品交換もしくは全額返金いたします。
ユニポスはD’Clawの調達販売を行い、海外製品調達に関するお困りごとを解決するサービスです。 詳しくはこちら。
納品・請求書による後払いです。
ご注文手続きはお見積もりメールへの返信のみでけっこうです。
ご注文の返信メールをいただいた後、弊社指定の銀行口座へのお振込みを確認した時点で注文の確定とさせていただきます。
※法人掛売りでのお支払いについては一定の条件がございます。
お支払い方法の詳細はお見積もりメールに記載しておりますので、ご確認ください。

xArm
最大7自由度 協働 ロボットアーム

Bitcraze Crazyflie 2.1シリーズ (2.1+, 2.1 Brushless)
手のひらサイズ ドローン組立キット (Bitcraze AB)

OpenArm 2.0
双腕ヒューマノイド 視覚認識マニピュレーション 研究開発プラットフォーム

Gazepoint Analysis
視線行動分析 ヒートマップ可視化 アイトラッキング解析ソフト

UFactory Lite 6
卓上サイズ 6自由度 ロボットアーム

MANUS データグローブ
データグローブ ハンドトラッキング 触覚フィードバック